연구 분야
연구내용
- 신원 확인 시스템
- 물체인식 시스템
- Edge AI 플랫폼 활용 기술
- FPGA 기반 가속화 기술

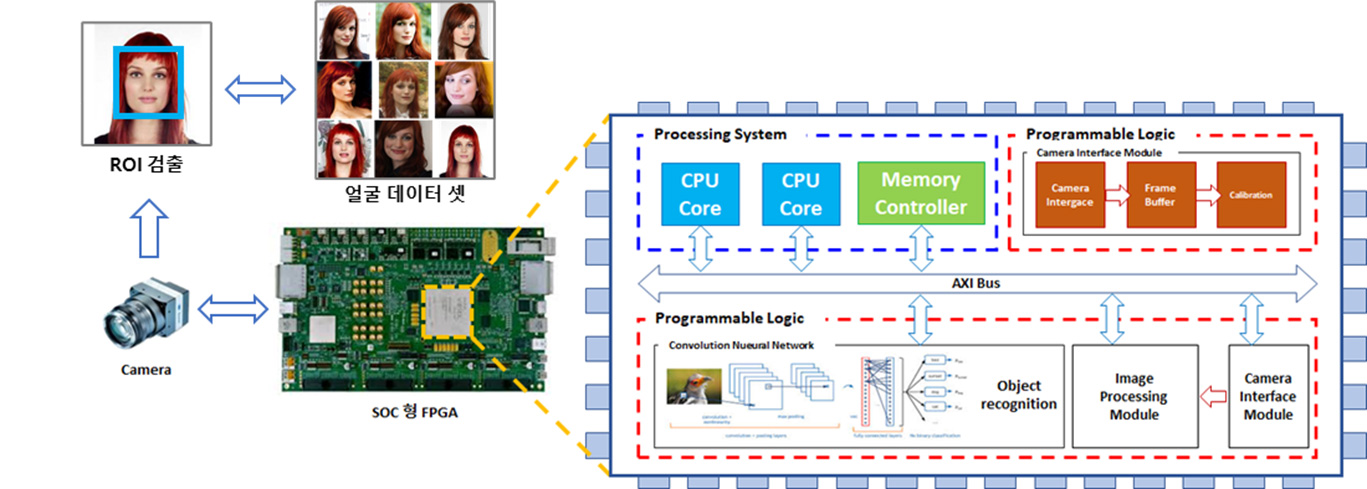
신원 확인 시스템 IDENTIFICATION SYSTEM
신원확인이 가능한 엣지 디바이스 플랫폼 개발
주요 특징
- CNN 연산 가속화를 위한 SoC 형 FPGA 기반 딥러닝 알고리즘 하드웨어 설계
- - 최근 디바이스에 대한 의존도가 증가함으로써 하드웨어 공급자 중심의 엣지 AI의 필요성이 증가하고 있음
- - 신원인식을 위한 딥 뉴럴 네트워크를 선정 후 핵심 연산 모듈을 하드웨어 영역에서 설계
- - 딥 뉴럴 네트워크 경량화 및 가속화를 위한 연산 모듈 최적화 및 가속화를 위한 데이터 압축 기법 적용
- Xilinx VITIS AI 기반 딥러닝 알고리즘 소프트웨어 구현
- - Xilinx library인 DNNDK를 이용한 메모리 및 데이터 압축 기법 수행
- - FPGA 딥 뉴럴 네트워크 API를 적용하여 가속화 및 최적화 수행
AI칩 : http://www.aitimes.com/news/articleList.html?sc_area=A&sc_word=AI%EC%B9%A9&view_type=sm
활용 분야
- 인공지능 내장형 디바이스 플랫폼
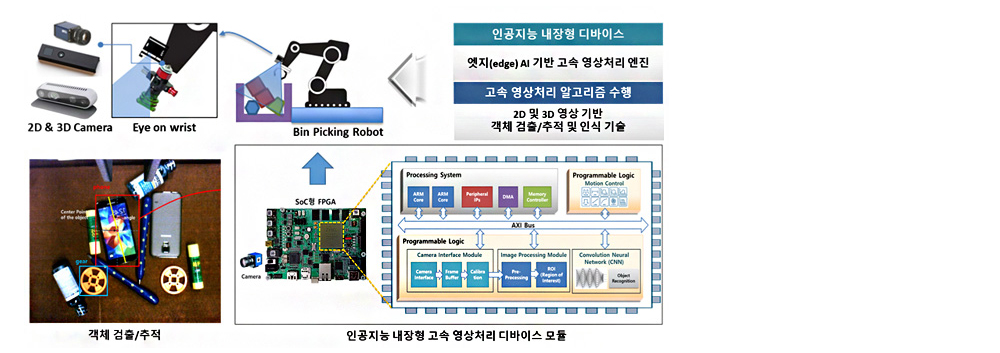
물체인식 시스템OBJECT RECOGNITION SYSTEM
Bin Picking Robot 및 Smart Factory용 알고리즘 가속화 플랫폼 개발
주요 특징
- 실시간 물체인식을 위한 FPGA 기반 알고리즘 가속화 기술
- - 지능형 물류 로봇 플랫폼에서 실시간 물체인식을 위해 FPGA를 사용한 알고리즘 가속화
- - 영상의 전처리 및 주요 알고리즘의 연산 부분 로직화 및 real-time을 위한 하드웨어 설계 및 가속화 기술
- - 학습된 데이터를 기반으로 실시간 물체인식을 위한 합성 신경망(Convolutional Neural Network: CNN) 가속화 기술
- - 연산 모듈 최적화 기술 및 압축 기법과 다양한 가속화 기술 적용을 통한 알고리즘 가속화 기술
활용 분야
- 지능형 로봇을 위한 딥러닝 기반 영상처리 플랫폼
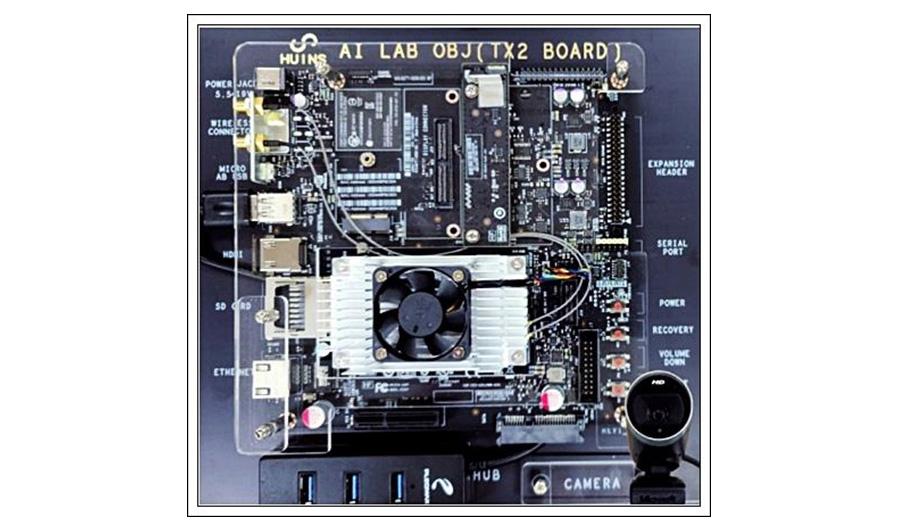
Edge AI 플랫폼 활용 기술EDGE AI PLATFORM UTILIZATION TECHNOLOGY
NVIDIA 및 NPU 기반 플랫폼을 사용한 Edge AI 디바이스 개발
주요 특징
- NVIDIA Jetson 기반 플랫폼을 활용한 Edge AI 디바이스 개발
- - 딥러닝 프레임워크 기반 환경 구축
- - CNN, RNN, KNN 등의 네트워크 적용 및 활용 방안 연구
- - Jetson 기반 인공지능 내장형 프로세서 기반으로한 디바이스 플랫폼 개발
- NPU(Neural Processing Unit) 기반 플랫폼을 활용한 Edge AI 디바이스 개발
- - NPU 활용을 통한 딥러닝 연산 가속 및 최적화 연구
- - RKNN API 환경 구축 및 적용
- - NPU 기반 얼굴 인식 디바이스 연구
활용 분야
- GPU 기반 플랫폼
- NPU 기반 플랫폼

Core-3399Pro-JD4 - http://www.t-firefly.com/product/coreboard/core_3399pro_jd4.html?theme=pc
FPGA 기반 가속화 기술FPGA-BASED ACCELERATION TECHNOLOGY
FPGA 기반 알고리즘 가속화 요소 기술 연구
주요 특징
- 알고리즘 가속화를 위한 FPGA 기반 디지털회로 설계
- - FPGA란 field programmable gate array의 약어로 용도에 맞게 유동적인 회로 변경이 가능
- - FPGA를 사용한 알고리즘의 핵심 연산 부분 로직화 및 real-time을 위한 하드웨어 설계 및 가속화 기술
- - 연산 모듈 최적화 기술 및 압축 기법과 다양한 가속화 기술 적용을 통한 알고리즘 가속화 기술
- - FPGA의 PS 영역과 PL 영역 간의 인터페이스를 위한 AXI 인터페이스 사용
- HLS(high-level synthesis)를 사용한 알고리즘 가속화 기법 연구
- HLS는 C/C++ 기반 프로그램의 알고리즘을 해석하여 하드웨어로 자동 변환해주는 하드웨어 설계 기법
- - https://www.xilinx.com/products/design-tools/vivado/integration/esl-design.html
AI칩 : http://www.aitimes.com/news/articleList.html?sc_area=A&sc_word=AI%EC%B9%A9&view_type=sm
활용 분야
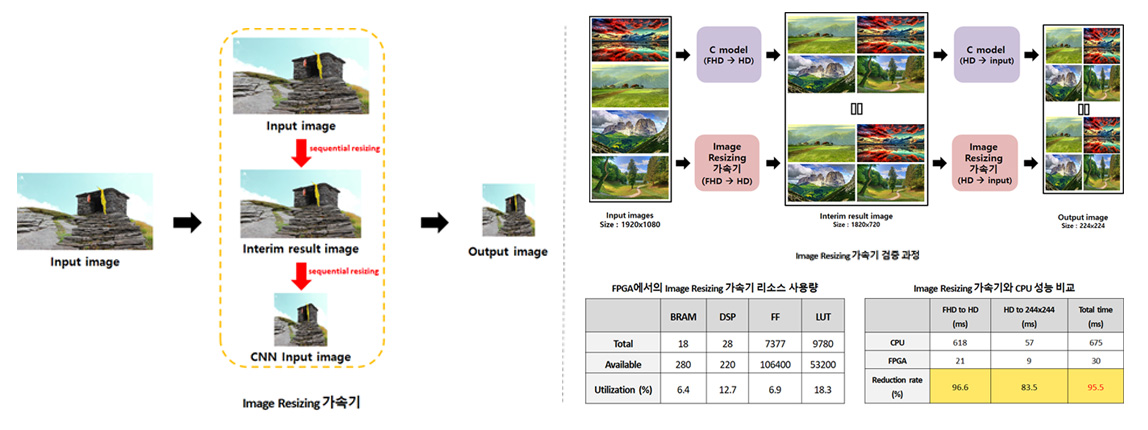
- FPGA 기반 CNN을 위한 Image Resizing 가속기
- - CPU 대비 처리시간이 90% 감소
- AMR (Autonomous Mobile Robot)
- Mobile Manipulator
- Mobile Robot 교육
AMR (Autonomous Mobile Robot)AUTONOMOUS MOBILE ROBOT
ROS 기반 AGV 플랫폼 연구 개발
주요 특징
- AGV 연구
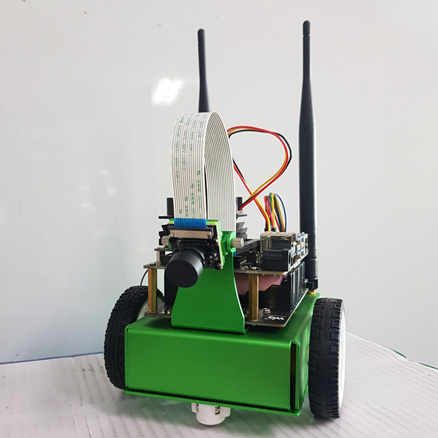
- AGV(Autonomous Guided Vehicle) 구조 설계
- - Lidar, Camera와 같은 다양한 센서의 통합 및 인터페이스 구성
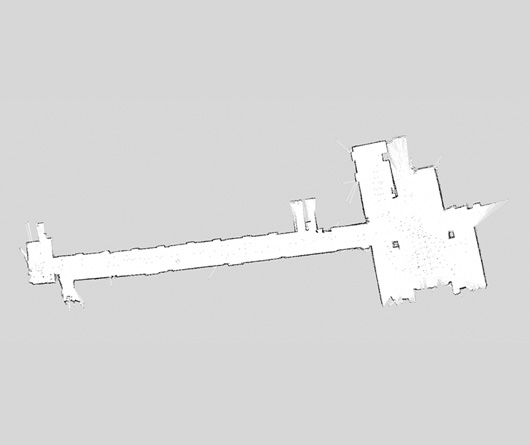
- - Lidar 및 SLAM을 활용한 맵 구축
- - 카메라를 통한 QR코드 인식 및 자율 주행 연구
활용 분야
- AGV

- SLAM을 활용한 맵 생성
Mobile ManipulatorMOBILE MANIPULATOR
다관절 로봇을 탑재한 AMR 연구 및 개발
주요 특징
- AMR 연구
- - AMR(Automated Mobile Robot)의 구조 설계
- - Lidar, Camera와 같은 다양한 센서의 통합 및 인터페이스 구성
- - Lidar를 사용하여 맵 구축 및 장애물 회피를 통한 Navigation 실행
- 다관절 로봇 연구
- - Manipulator의 hand-eye(camera) 및 딥러닝을 활용한 물체 파지 및 적재 알고리즘 연구
- - 다중 RGB depth 카메라를 사용한 물체의 좌표 파악 및 파지 알고리즘 개발
활용 분야
- Mobile Manipulator

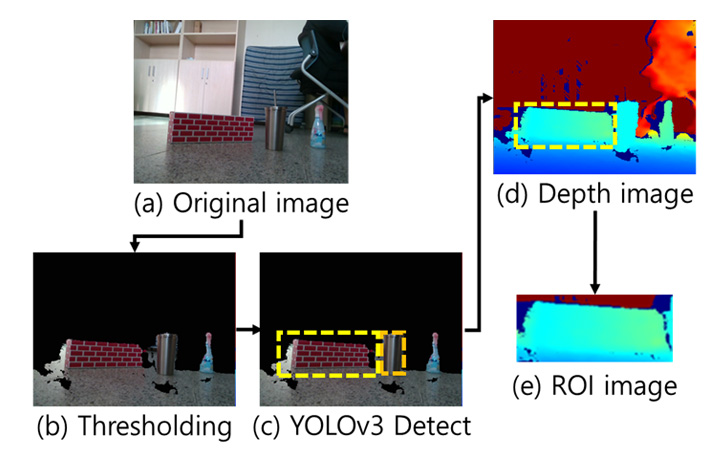
- 다중 RGB depth 카메라를 사용한 ROI 검출 연구
Mobile Robot 교육MOBILE ROBOT TRAINING
NVIDIA Jetson 및 ROS 기반 오픈소스 로봇 교육
주요 특징
- NVIDIA Jetbot을 활용한 인공지능 교육
- - NVIDIA Jetson Nano AI 컴퓨터가 포함된 Jetbot 키트를 통해 교육 진행
- - 안면 인식, 장애물 회피, 객체 추적, 라인 팔로잉 기술등을 조합하여 자율주행 로봇 프로젝트 수행
- - 군집 로봇 프로젝트 수행
- Tutlebot3 플랫폼을 사용한 ROS 교육
- - LiDAR, Camera 등 다양한 센서 인터페이스 및 자율주행 로봇 프로젝트 수행
- - Turtlebot 상단부에 오픈매니퓰레이터 탑재를 통한 피킹 로봇 프로젝트 수행
활용 분야
- Nvidia Jetbot 로봇
- Robotis Turtlebot3

- 오픈 매니퓰레이터(5축 매니퓰레이터)

Robotis Turtlebot3 : https://www.robotis.com
- 다관절 로봇
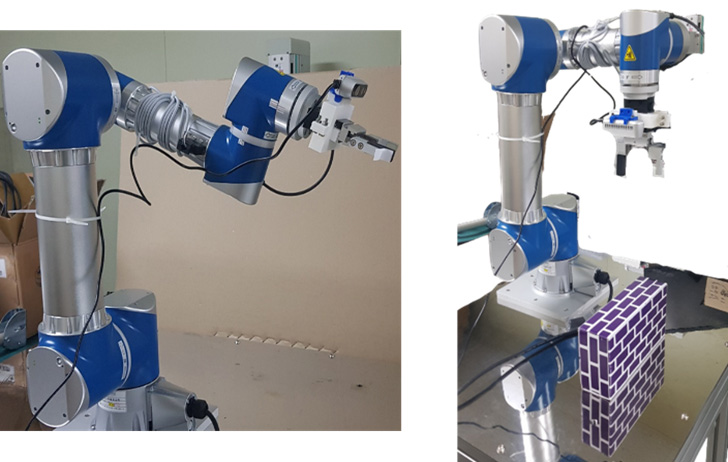
다관절 로봇A MULTI-JOINT ROBOT
Picking 작업 수행을 위한 매니퓰레이터 파지 알고리즘 연구
주요 특징
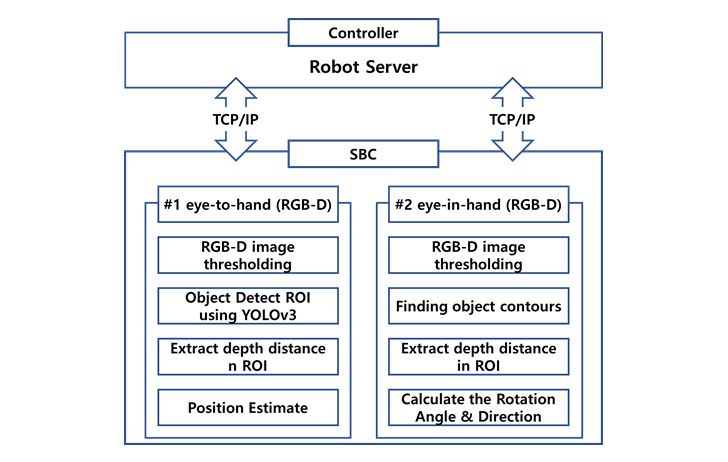
- eye-in-hand 카메라를 활용한 매니퓰레이터 파지 알고리즘
- - 지능형 물류 로봇 플랫폼에서 물체 파지 정확도를 올리기 위한 매니퓰레이터 기반 파지 알고리즘 연구
- - 물체의 윤곽선을 추출하기 위해 Depth 카메라를 사용한 물체 ROI 검출 기술
- - 다중 RGB Depth 카메라 및 딥러닝을 활용한 6축 매니퓰레이터 파지 알고리즘 개발
- - Depth 카메라와 QR코드 인식 기술을 활용한 5축 매니퓰레이터 파지 알고리즘 개발
활용 분야
- ZEUS-ZERO(6축 매니퓰레이터)
- Picking을 위한 전체 시스템 흐름도
Digital Twin
현실과 가상 간 데이터 연동을 통해 가상에서 현실과 동일한 동작 시뮬레이션이 가능하게 복제한 가상의 디지털 세계
주요 특징
- Digital Twin 구축
- - Digital Twin 구축을 위해 NVIDIA Omniverse 플랫폼 선정
- - NVIDIA Omniverse 요소 기술 연구 및 이를 활용하여 가상 스마트팩토리 환경 구축
- AR 장비를 활용한 AR 기능 분석
- - Microsoft의 Hololens2 기반 사용자 공간의 3D Modeling import
- - LG U+ AR Glass 기반 모바일 어플리케이션 미러링 및 어플리케이션 화면을 3D 화면을 3D 혼합 현실로 확대
- - 향후 Metaverse 플랫폼 기반 가상환경과 AR을 접목 한 연구 진행
활용 분야
- NVIDIA Omniverse

- AR/XR 장비